
Рис. 1. Состав системы
Подсистема. Система может быть разделена на элементы не сразу, а последовательным расчленением на подсистемы, которые представляют собой компоненты более крупные, чем элементы, и в то же время более детальные, чем система в целом (рис. 1). Возможность деления системы на подсистемы связана с вычленением совокупностей взаимосвязанных элементов, способных выполнять относительно независимые функции, подцели, направленные на достижение общей цели системы. Названием «подсистема» подчеркивается, что такая часть должна обладать свойствами системы (в частности, свойством целостности). Этим подсистема отличается от простой группы элементов, для которой не сформулирована подцель и не выполняются свойства целостности (для такой группы используется название «компоненты»). Например, подсистемы автоматизированной системы управления, подсистемы пассажирского транспорта крупного города.
Структура. Это понятие происходит от латинского слова structure, означающего строение, расположение, порядок. Структура отражает наиболее существенные взаимоотношения между элементами и их группами (компонентами, подсистемами), которые мало меняются при изменениях в системе и обеспечивают существование системы и ее основных свойств. Структура – это совокупность элементов и связей между ними. Структура может быть представлена графически, в виде теоретико-множественных описаний, матриц, графов и других языков моделирования структур.
Структуру часто представляют в виде иерархии. Иерархия– это упорядоченность компонентов по степени важности (многоступенчатость, служебная лестница). Между уровнями иерархической структуры могут существовать взаимоотношения строгого подчинения компонентов (узлов) нижележащего уровня одному из компонентов вышележащего уровня, т.е. отношения, так называемого древовидного порядка. Такие иерархии называют сильными или иерархиями типа «дерева». Они имеют ряд особенностей, делающих их удобным средством представления систем управления. Однако могут быть связи и в пределах одного уровня иерархии. Один и тот же узел нижележащего уровня может быть одновременно подчинен нескольким узлам вышележащего уровня. Такие структуры называют иерархическимиструктурами со слабыми связями. Между уровнями иерархической структуры могут существовать и более сложные взаимоотношения, например, типа «страт», «слоев», «эшелонов». Примеры иерархических структур: энергетические системы, автоматизированные системы управления, государственный аппарат.
Связь. Понятие «связь» входит в любое определение системы наряду с понятием «элемент» и обеспечивает возникновение и сохранение структуры и целостных свойств системы. Это понятие характеризует одновременно и строение (статику), и функционирование (динамику) системы.
Связь характеризуется направлением, силой и характером (или видом). По первым двум признакам связи можно разделить на направленные и ненаправленные, сильные и слабые, а по характеру – на связи подчинения, генетические, равноправные (или безразличные), связи управления. Связи можно разделить также по месту приложения (внутренние и внешние), по направленности процессов в системе в целом или в отдельных ее подсистемах (прямые и обратные). Связи в конкретных системах могут быть одновременно охарактеризованы несколькими из названных признаков.
Важную роль в системах играет понятие «обратной связи». Это понятие, легко иллюстрируемое на примерах технических устройств, не всегда можно применить в организационных системах. Исследованию этого понятия большое внимание уделяется в кибернетике, в которой изучается возможность перенесения механизмов обратной связи, характерных для объектов одной физической природы, на объекты другой природы. Обратная связь является основой саморегулирования и развития систем, приспособления их к изменяющимся условиям существования.
Состояние. Понятием «состояние» обычно характеризуют мгновенную фотографию, «срез» системы, остановку в ее развитии. Его определяют либо через входные воздействия и выходные сигналы (результаты), либо через макропараметры, макросвойства системы (например, давление, скорость, ускорение – для физических систем; производительность, себестоимость продукции, прибыль – для экономических систем).
Более полно состояние можно определить, если рассмотреть элементы e (или компоненты, функциональные блоки), определяющие состояние, учесть, что «входы» можно разделить на управляющие и и возмущающие х (неконтролируемые) и что «выходы» (выходные результаты, сигналы) зависят от e, и и х, т.е. zt=f(et, ut, xt). Тогда в зависимости от задачи состояние может быть определено как {e, и}, {e, u, z} или {e, х, u, z}.
Таким образом, состояние– это множество существенных свойств, которыми система обладает в данный момент времени.
Поведение. Если система способна переходить из одного состояния в другое (например, z1 ® z2 ® z3), то говорят, что она обладает поведением. Этим понятием пользуются, когда неизвестны закономерности переходов из одного состояния в другое. Тогда говорят, что система обладает каким-то поведением и выясняют его закономерности. С учетом введенных выше обозначений поведение можно представить как функцию zt=f(zt-1, xt, ut).
Внешняя среда – множество элементов, которые не входят в систему, но изменение их состояния вызывает изменение поведения системы (рис. 2).
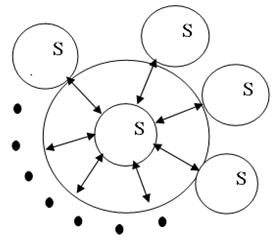
Рис. 2. Взаимодействие системы S с окружающей средой (системы S1, S2, …, Sk)
Модель – описание системы, отображающее определенную группу ее свойств. Углубление описания – детализация модели. Создание модели системы позволяет предсказывать ее поведение в определенном диапазоне условий.
Модель функционирования (поведения) системы – это модель, предсказывающая изменение состояния системы во времени, например: натурные (аналоговые), электрические, машинные на ЭВМ и др.
Равновесие – это способность системы в отсутствие внешних возмущающих воздействий (или при постоянных воздействиях) сохранить свое состояние сколь угодно долго.
Устойчивость – способность системы возвращаться в состояние равновесия после того, как она была из этого состояния выведена под влиянием внешних возмущающих воздействий. Эта способность обычно присуща системам при постоянном управляющем воздействии ut, если только отклонения не превышают некоторого предела.
Состояние равновесия, в которое система способна возвращаться, по аналогии с техническими устройствами называют устойчивым состоянием равновесия.Равновесие и устойчивость в экономических и организационных системах – гораздо более сложные понятия, чем в технике, и до недавнего времени ими пользовались только для некоторого предварительного описательного представления о системе. В последнее время появились попытки формализованного отображения этих процессов и в сложных организационных системах, помогающие выявлять параметры, влияющие на их протекание и взаимосвязь.