![]() ,
, ![]() , если
, если ![]() (21)
(21)
![]() ,
, ![]() , если
, если ![]() (22)
(22)
Отсюда видно, что u есть решение задачи Коши для однородного уравнения (17), удовлетворяющее начальным условиям (18), а v есть решение задачи Коши для неоднородного уравнения (18), удовлетворяющее начальным условиям (18) или (19). При этом для любого c функция (20) удовлетворяет первому краевому условию (18), т.е. при x=a.
Подберем теперь постоянную c так, чтобы функция (22) удовлетворяла второму краевому условию (20) при x=b. Будем иметь
![]() , откуда
, откуда
![]() (23)
(23)
Лекция 17. Модели многосвязных технических систем
Основные понятия
Многосвязная техническая система может состоять из подсистем разной физической природы. Например, автомобиль включает в себя подсистемы питания, смазки, охлаждения, электроснабжения и др. Все эти подсистемы при функционировании тесно взаимодействуют друг с другом. Моделирование подобных систем удобно осуществлять на макроуровне. Для этой цели разработан универсальный аппарат с мощным программным обеспечением. Мы рассмотрим основные принципы моделирования систем на макроуровне, при этом будем использовать несколько устаревшие, но весьма наглядные условные обозначения элементов.
Каждый элемент технической системы выполняет вполне определенные функции. Математическое описание этой функции в форме аналитического выражения или в виде систем уравнений (алгебраических, дифференциальных, интегральных) образует математическую модель элемента. Переменные, которые фигурируют в математической модели и определяют в конечном итоге состояние или поведение элемента, принято называть переменными состояния или фазовыми переменными, а уравнения, устанавливающие связь между разнородными фазовыми переменными в пределах одного элемента – компонентными уравнениями.
Если обозначить фазовые переменные для i-го элемента через ![]() и
и ![]() то компонентное уравнение можно записать в виде
то компонентное уравнение можно записать в виде
![]() (1)
(1)
Для объединения элементов в ансамбль (рис. 1) для каждого узла сопряжения элементов должна быть установлена зависимость между однородными фазовыми переменными
![]() ; (2)
; (2)
![]() (3)
(3)
тех элементов i, j, . системы, которые примыкают к данному узлу.

Рис. 1 Фрагмент системы элементов
В общем случае техническая система может состоять из элементов разной физической природы, поэтому при объединении элементов в ансамбль могут встретиться большие трудности (при попытках установить связь между фазовыми переменными различных элементов). Такие трудности будут устранены, если для всех элементов системы использовать группы однородных фазовых переменных, имеющих одинаковое математическое описание вне зависимости от типа элемента и протекающих в нем процессов. А это значит, что фазовые переменные, входящие в уравнения типа (1), должны отражать фундаментальные закономерности, присущие всем элементам системы. Примером фундаментальных закономерностей являются энергетические принципы, которые мы и будем брать за основу при рассмотрении электрических, механических, тепловых, гидравлических и пневматических подсистем.
В каждой такой подсистеме энергия может быть представлена в форме совокупностей потенциальной V и потоковой J дуальных переменных, а все многообразие элементов может быть сведено к простейшим элементам трех типов: С, L, R. На элементах С и L происходит накопление потенциальной (кинетической) энергии, а на элементе типа R – рассеивание (диссипация) энергии.
Моделирующий элемент может представлять собой (замешать) физическую единицу системы, либо отражать отдельные свойства такой единицы в форме математических образов. Поэтому при рассмотрении аналогий компонентных уравнений было бы правильно использовать понятие «компоненты», однако, в силу сложившихся традиций, мы будем называть замещающие двухполюсники элементами, имея в виду, что реальный элемент системы иногда может быть замещен двумя и более двухполюсниками.
Типы элементов
Элемент типа С.Элемент типа С характеризует емкость, инертность и другие подобные свойства моделируемой системы. Графическое изображение такого элемента (двухполюсника) показано на рис. 2, а. Для механических подсистем используют также иное условное обозначение (рис. 2, б), при этом параметру С присваивают символ т.
Компонентное уравнение (1) для элемента типа С имеет вид
![]() (4)
(4)
где F и V – соответствующие потоковые и потенциальные фазовые переменные.
В электрических подсистемах элемент типа С определяет электрическую емкость и описывается уравнением
![]() , (4a)
, (4a)
где I и U – соответственно сила тока и падение напряжения.
В механических подсистемах элемент С характеризует массу тела в уравнении второго закона Ньютона:
![]() . (46)
. (46)
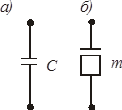
Рис. 2. Элемент типа С
Аналогично для механических вращательных подсистем формулу (4) можно записать в виде
![]() , (4в)
, (4в)
где М– момент силы; I – момент инерции; ![]() – угловая скорость.
– угловая скорость.
В тепловых подсистемах С характеризует теплоемкость тела C=dQ/dT, где dQ —изменение количества теплоты в теле при изменении температуры на dТ.
Компонентное уравнение (4) применительно к тепловому потоку Ф и температуре Т имеет вид
![]() (4г)
(4г)
где ![]() – теплоемкость тела, зависящая от удельной теплоемкости с и массы m тела:
– теплоемкость тела, зависящая от удельной теплоемкости с и массы m тела:![]() .
.
В гидравлических и пневматических подсистемах значения С характеризуют степень сжимаемости жидкости (газа) при плотности ρ и объеме V: C=pβV. При этом связь между давлением ρ и расходом Qm определяется формулой